倉庫業務の「見える化」出来ていますか?
「委託作業の内容がブラックボックス化している」
「業務が煩雑で熟練者しか作業ができない」
「システム投資を行いたいけど費用対効果の見込みが少ない」
倉庫業務においては煩雑な業務が多く、業務をスムーズに行うためには長年の経験が必要です。
そのため、熟練者の依存が強く、業務の見える化ができていない企業がほとんどです。
国内の製造業、物流業は、慢性的な人手不足に悩まれています。この問題をどのように解決するかが今、経営者に求められています。
今回、フォークリフトのIoT化を起点とした製紙産業のDX推進について、エッジコンピューティング分野のリーディングカンパニーであるイーソル株式会社主催のセミナーを取材しました。

本セミナーでは、製紙産業のDX推進に取り組むeyeForklift株式会社の代表・野正氏が登壇し、現場の課題と考案したエッジデバイスについて解説しました。今回の記事では、セミナー内容をレポート形式でご紹介します。
「倉庫業務のDX推進を検討している」「倉庫の業務改善をどう進めたら良いか分からない」といった経営者・工場担当者にピッタリな内容となっています。ぜひ最後まで読み進めてください。
製紙産業における現場の「見える化」を目指した
野正氏はeyeForkliftを立ち上げ、製紙産業のDX推進の取り組みとして製紙産業の見える化を目指しました。そもそも、なぜ製紙産業に着目したのでしょうか。
なぜ製紙業界なのか?

さまざまな業界がある中で、製紙業界に着目した理由の一つに、産業全体の規模が大きいことが挙げられます。
製紙業界全体の製品出荷額は約7.6兆円あり、そこで従事している人は約18.7万人と、非常に大きな業界です。
その一方で、製紙業界は未だに高度経済成長の構造となっています。
紙の国内需要は徐々に減っていますが、流通プロセスは注文の小口化対応に苦慮しています。製紙メーカーは設備稼働率の最大化が困難な状態なのです。
まずは現場作業の見える化を行い、生産性を上げていく。そうすることで、さらに成長産業となる可能性を秘めているのが製紙業界です。
見える化を進める中での課題

業務の見える化を進める中で、まずは製紙産業における課題を解決していく必要がありました。
製紙業界においての課題は、おもに以下が挙げられます。
①委託作業の内容がブラックボックス化している
→請負作業者が採用できず、慢性的な人員不足につながっている
②業務が複雑なため、熟練者しか作業できない
→自動化・ロボットの導入がコスト的に難しい
③費用対効果が少なく、システムへの投資が出来ない
→このままだと、工場の操業が出来なくなる可能性がある
製紙業界では人手不足が深刻になっています。
その上、長く従事している現場の方しか知らないような細かい作業があり、一連の業務を発注側である企業が細部まで可視化できていない状態も問題となっています。業務の効率化を目指すうえで、こうした一連の流れを把握することが解決のキーとなります。
そこで、現場の業務効率化と生産性向上を目的に現場(製品在庫)の見える化ができるエッジデバイスの開発に踏み切りました。
考案されたエッジデバイスの特長
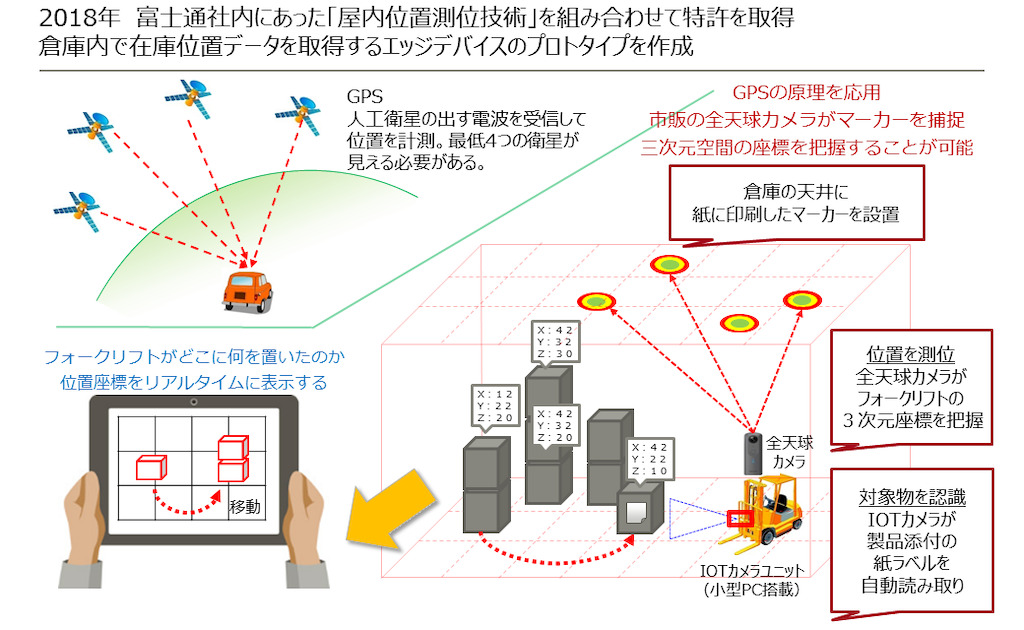
エッジデバイスの開発にあたり、野正氏の出身である大手メーカー・富士通での経験やノウハウが活かされました。
製紙工場では平置き倉庫に原紙在庫を保管しており、フォークリフトで在庫を移動させています。製品には仕様が書かれた紙ラベルが貼られており、倉庫番と呼ばれる人がそれを見て管理します。
メーカーによって仕様が異なるほか、どこに何を置いているのかをすべて把握することは困難です。しかし、エッジデバイスを導入することで、これまで製品管理に業務時間の多くを費やしてきた問題を解決することが可能になりました。
エッジデバイスの特長は以下です。
GPSの原理を応用

車などに使用されるGPSは人工衛星の出す電波を受信し、位置を計測しています。エッジデバイスの場合、天井にマーカーを設置し、フォークリフトに設置された360°確認可能な全天球カメラがそのマーカーをもとに倉庫のロケーション管理を行っています。
電波を発信するビーコンでも同様のことができますが、数年おきの電池交換が必要となります。しかし、eyeForkliftのエッジデバイスの場合は紙でできているため非常に安価であるほか、電池の交換も必要ありません。
業務効率化を叶える3つのユニット
フォークリフトには3つのユニットが取り付けられています。これら1つ1つの働きや特徴は下記の通りです。
ユニット1:ラベルの認識
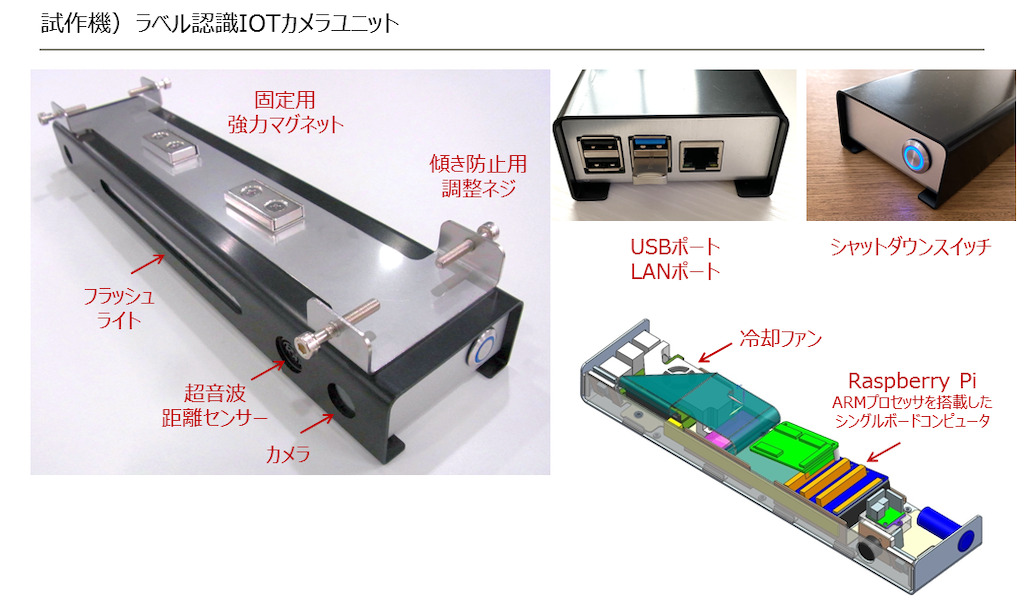
ユニット1はフォークリフトの爪先に取り付けられています。製品を掴んだ時にラベルを自動的に読み取ります。ユニット1は製品との距離をはかる距離センサーが搭載されており、フォークリフトが何をつかんでいるのか、いないかの状態を把握することも可能です。
ユニット2:タブレット端末で撮影・文字情報の処理
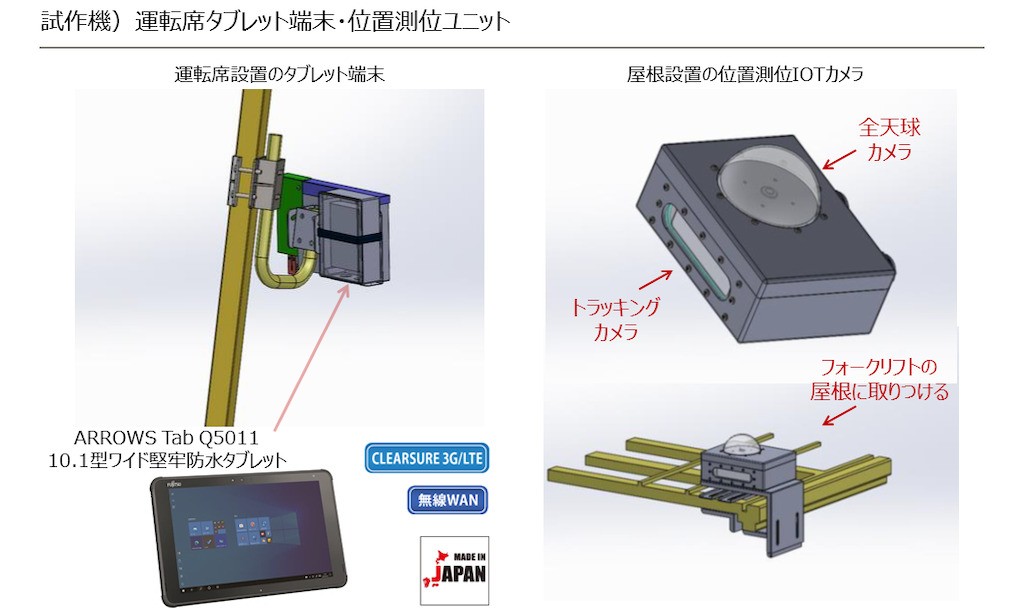
ユニット2は運転席に取り付けているタブレット端末です。爪先にあるIOTカメラ(ユニット1)が掴んだものの画像を撮影し、ユニット2に転送されます。撮影された画像からターゲットとなるラベル画像を機械学習で抽出して、記載されている文字情報をOCR処理によって識別します。
また、フォークリフトがどこにいるのか、座標情報を転送することができます。取得した座標データをあらかじめ設定した倉庫のマップに反映することで、どこに何を置いているのかを把握することが可能です。
ユニット3:位置の測位
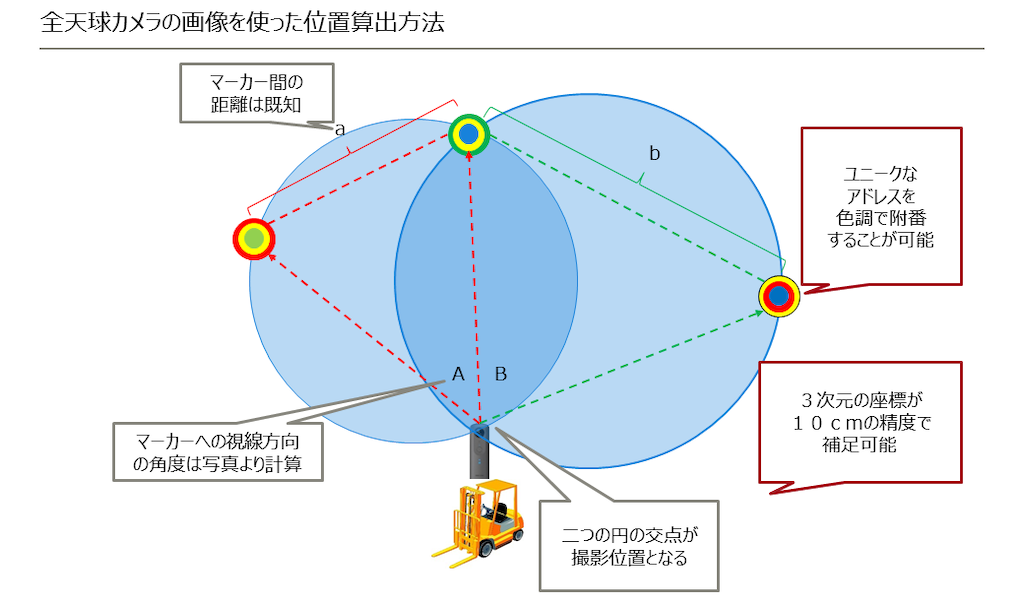
ユニット3は屋根に設置された位置を測位するためのIOTカメラです。全天球カメラが天井に貼ったマーカーをもとに3次元座標を把握します。測位精度は10cmとなります。
また、原紙に近づくとセンサーが察知し、自動的に作動します。どのラベルをどこで掴んだのかを瞬時に把握することが可能です。
※全天球カメラについて:全天球カメラで写真を撮ると天井に貼ったマーカーが映り込み、自動的に水平面と垂直面から何度の傾斜角があるのかということを自動的に計測します。そこから3点測位で自分の位置を把握することが可能。10cm程度の精度で把握できるため、これを用いて移動することで、製品がどこにあるかを把握できます。
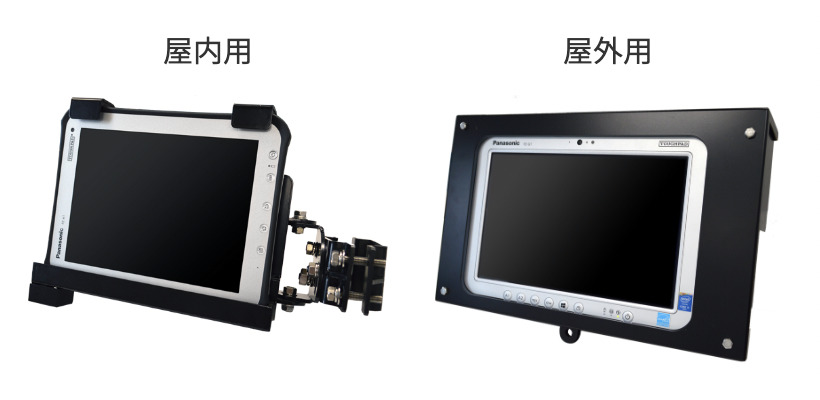
装着にはイーソルの端末フォルダを使用
ユニットを装着するにあたって、2つの問題がありました。
1つ目は振動の問題です。フォークリフトは走行中の振動が激しいので、タブレット端末が破損しないようしっかりと固定する必要があります。
もう1つは、自分の位置を把握するカメラの解像度が、外部の光などに影響されることです。
これらの課題を解決するために、頑丈かつ光加減の調節が可能であるイーソルの端末フォルダが活用されました。
eyeForkliftが目指す未来
eyeForkliftが目指しているのは、ロボティクス時代に先駆けたイノベーションです。
それに向けて今取り組んでいることとして、エッジデバイスを実用レベルに落とし込むために以下の性能目標を設定し、開発しています。
①1m以内の位置測位精度の向上
②製品ラベル文字の認識精度ほぼ100%
③運用上におけるリカバリ手段を検討
全天球カメラによる位置測位技術は、プロトタイプにおいては10cmの精度で位置が測位できるのですが、実際の倉庫現場環境(高速で移動するフォークリフト、薄暗い倉庫、電磁ノイズが多いなど)の中でも、実用レベルでの精度を達成する必要があります。技術的にできることと、使えるレベルまでに進化させることには大きな落差があります。そのためにeyeForkliftは、将来のセンサーデバイスの進化に柔軟に対応し、複数の測定手段を積極的に取り入れながら精度の向上を目指しています。
DX化の推進において大切なのはコストが見合うかどうかであって、受け入れられるリーズナブルなコストで実現されるべきです。eyeForkliftでは、現実的に導入が可能なデバイスの開発に引き続き取り組んでいます。
エッジデバイスの詳細は下記のリンクをご覧ください。
eyeForklift株式会社コーポレートサイト:https://eyeforklift.com/
デバイスだけでなく、端末フォルダ選びも重要!
本セミナーの講義を通して、製紙産業の業務効率化、生産性向上においてエッジデバイスはとても重要であることが分かりました。そして、このエッジデバイスには端末フォルダが欠かせない存在です。
イーソルはフォークリフト専用の端末フォルダを開発しています。イーソルの端末フォルダの特長を下記にまとめました。
- 基本的にどのフォークリフトにも装着可能。(例:トヨタL&F、三菱ロジスネクスト、住友ナコフォークリフト、Sugico、コマツカスタマーサポート)
- iPadやDELL、Panasonic、富士通やNECなどのタブレットに対応
- フォークリフトの激しい振動を吸収する構造
- 屋外用はIP64準拠の防水性能を実現
- 電圧変換ユニットやスキャナーを取り付けるといった要望に沿ったカスタマイズが可能
汎用性のあるタブレット固定製品は100円均一ショップなどでも販売されています。ですが、安価なフォルダではフォークリフトの振動がタブレット端末の故障に繋がりかねません。イーソルのフォルダには金具の設計やクッションに独自の技術が採用され、安心してタブレットを装着できるよう設計されています。
下記のロゴをクリックすると、製品の詳細をご覧いただけます。
また、本取材セミナーのオンデマンド視聴は、下記の画像をクリックしたページからお申し込みいただけます。